始于
分类:目标跟踪
Tags: [ 目标跟踪 ]
Qingrong Chen
基于格拉布斯准则和改进粒子滤波算法的水下传感网目标跟踪
基于格拉布斯准则和改进粒子滤波算法的水下传感网目标跟踪
大家好,本周给大家分享的论文是来自电子与信息学报的一篇论文,名叫“基于格拉布斯准则和改进粒子滤波算法的水下传感网目标跟踪”,这篇论文考虑了每个传感器节点对目标状态的估计贡献度提出了一种新的粒子滤波方法。
论文网址:https://jeit.ac.cn/cn/article/doi/10.11999/JEIT190079
01 Background
水下无线传感网络在执行目标跟踪任务时方法有许多,如卡尔曼滤波、粒子滤波、基于深度学习的孪生网络、均值漂移等都可以作为目标跟踪的方法。但水下环境一般是非线性非高斯系统,选用粒子滤波作为水下目标跟踪算法一般会有更好的精度表现。但现有方法在处理异常数据、权重融合以及有限能量消耗方面仍存在不足。基于此,本文提出了一种结合Grubbs准则和改进粒子滤波算法的分布式目标跟踪算法,以提高目标跟踪的跟踪精度。
02 Motivation
这篇文章的动机(Motivation)源于水下无线传感网络(UWSN)在进行目标跟踪时遇到的具体挑战和限制。具体来说,这些挑战包括:
- 传感器测量值贡献不均:各个传感器节点由于位置、方向等因素的不同,其提供的测量值对目标状态估计的贡献也不同。
- 传感器能量有限:传感器节点的能量是有限的,并且更换电池困难,因此需要优化能量使用以延长网络寿命。
为了解决上述问题,提高UWSN的目标跟踪性能,作者提出了基于Grubbs准则和互信息熵加权融合的分布式粒子滤波(PF)目标跟踪算法(GMIEW)。该算法旨在通过以下方式改进目标跟踪的效果:
- 去除干扰和错误信息:利用Grubbs准则分析检验传感器节点获得的信息,去除异常数据,确保剩余数据近似服从正态分布。
- 动态调整节点权重:采用传感器节点的测量值与目标状态之间的互信息熵来反映各节点提供的目标信息量,从而动态计算各节点的权重,使权重具有一定的客观性。
03 Method
这篇文章提出的方法(Method)主要集中在开发一种基于Grubbs准则和互信息熵加权融合的分布式粒子滤波(PF)目标跟踪算法(GMIEW),以应对水下无线传感网络(UWSN)中目标跟踪遇到的具体挑战。以下是该方法的主要组成部分:
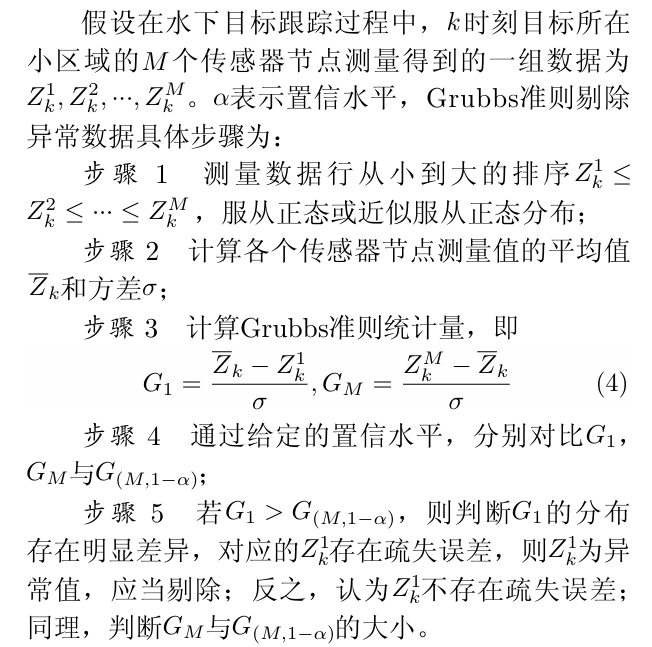
1.Grubbs准则用于数据预处理
Grubbs准则是一种用于检测和分析服从正态分布或接近正态分布样本中异常数据的方法。在本文中,Grubbs准则被用来分析传感器节点所获取的测量数据,以识别并排除异常数据,使远离真实值的数据相对减少,来保证剩余数据近似地服从正态分布。
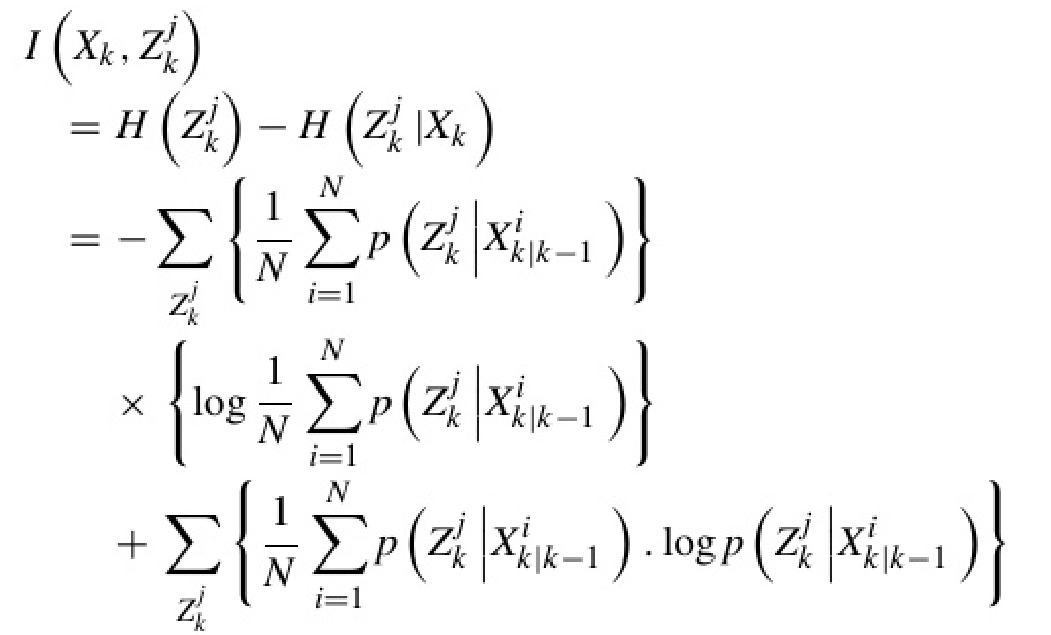
2.互信息熵用于动态加权
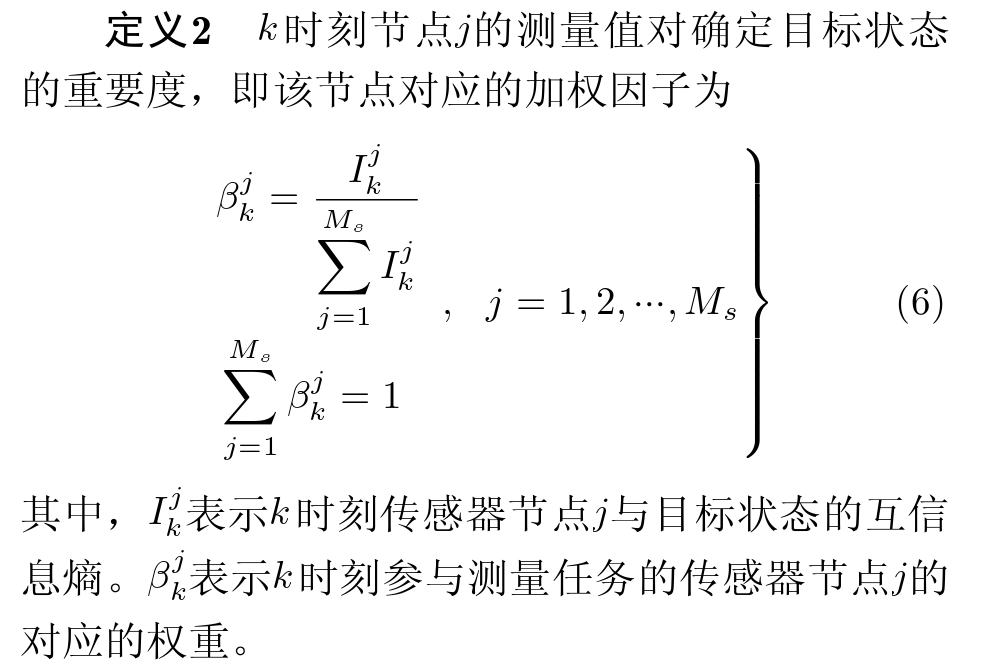
互信息熵可以用来衡量传感器节点对目标状态提供的信息量,即传感器节点能够为目标状态估计提供多少有效信息。通过计算互信息熵,可以确定每个传感器节点对于目标状态估计的贡献程度。互信息熵越大,表示该传感器节点提供的关于目标的信息越多,因此应该赋予的权重系数也越大。
2-1. 加权因子
2-2. 重要性权值

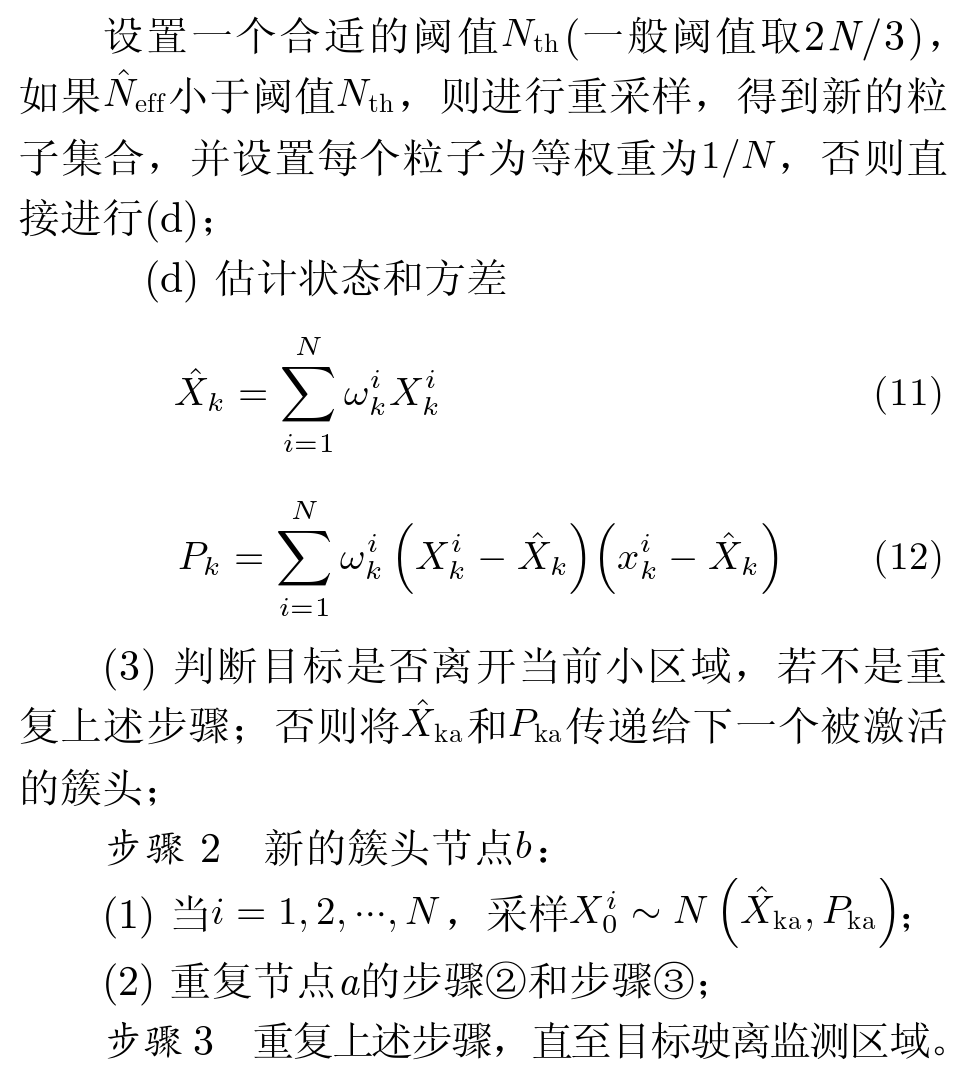
3.互信息熵加权融合分布式粒子滤波目标跟踪算法

04 Experiments
(1)通过做仿真实验,和另外两种算法进行对比
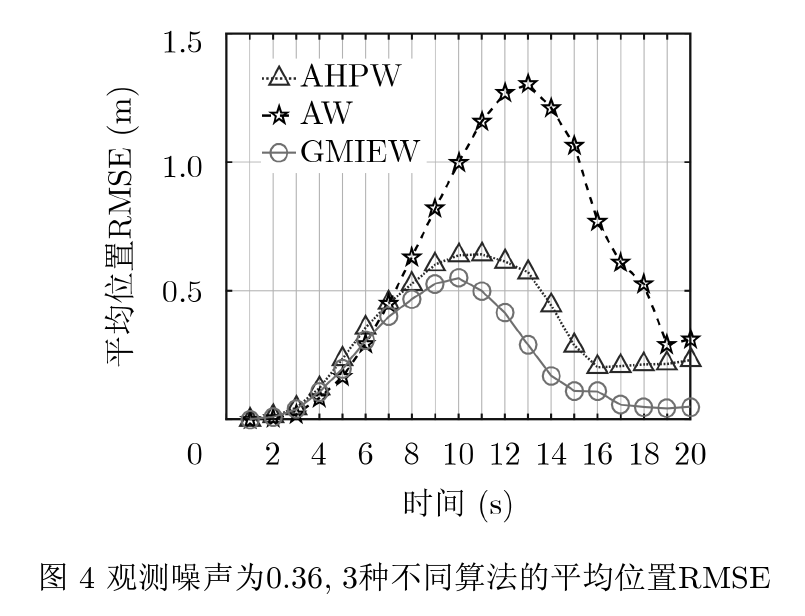
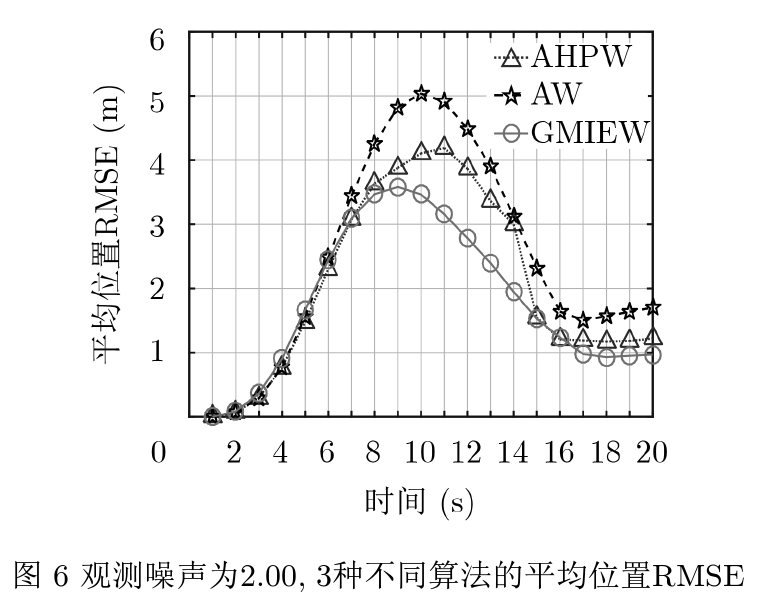 总结:随着观测方差增加,所有算法的跟踪精度都有不同程度下降,但GMIEW算法始终能更贴近目标的真实轨迹,其平均位置RMSE始终小于其他两种算法,表明GMIEW具有更好的鲁棒性和更高的跟踪精度
(2)本文还探究了传感器密度对目标跟踪效果的影响
总结:随着观测方差增加,所有算法的跟踪精度都有不同程度下降,但GMIEW算法始终能更贴近目标的真实轨迹,其平均位置RMSE始终小于其他两种算法,表明GMIEW具有更好的鲁棒性和更高的跟踪精度
(2)本文还探究了传感器密度对目标跟踪效果的影响
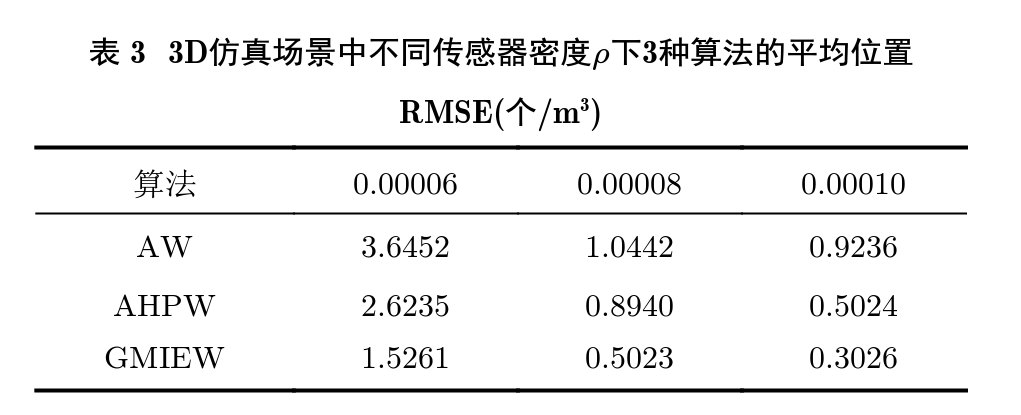 总结:当传感器密度从0.00006增加到0.00008时,目标的跟踪精度显著提高;但当密度继续增加到0.00010时,跟踪精度提升幅度减小,表明存在一个最优密度,在此之上使用更多传感器带来的收益有限。
总结:当传感器密度从0.00006增加到0.00008时,目标的跟踪精度显著提高;但当密度继续增加到0.00010时,跟踪精度提升幅度减小,表明存在一个最优密度,在此之上使用更多传感器带来的收益有限。
06 Innovation point
本文的创新点我认为是引入了互信息熵来评估每一个传感器节点对目标状态估计的贡献,贡献大的传感器节点加权因子就大,再将加权因子纳入重要性权值的计算范围,让粒子滤波的权值更新能考虑传感器节点的实际情况。